
AutoReflex is a real-time neuromuscular aim-assist system that combines computer vision, servo-driven mechanical actuation, and transcutaneous electrical nerve stimulation (TENS) to physically guide a player's aim. A Jetson Nano detects on-screen targets at 100fps and streams coordinates over UDP to a Raspberry Pi, which runs a 1kHz PID control loop driving a Feetech ST3215 servo and optional solenoid trigger — closing the loop from pixels to physical movement in under 15ms.
The Problem
Aim assist in competitive gaming is almost universally software-only — a cheat applied in the rendering pipeline, trivially detectable by anti-cheat systems. The question we wanted to answer: what does a hardware-level aim-assist look like? One that operates entirely outside the game process, at the level of physical muscle stimulation and mechanical actuation, with end-to-end latency low enough to be useful in real play.
The result is a closed-loop system spanning two compute nodes, a servo motor, and a TENS unit — all synchronized at kilohertz rates.
Architecture
AutoReflex runs as two cooperating nodes over a direct Ethernet link:
- Vision node (Jetson Nano): Arducam OV9782 captures at 100fps, runs HSV color thresholding or YOLO11n detection, and transmits 20-byte UDP packets containing target centroid, crosshair position, and blob width.
- Control node (Raspberry Pi): Receives packets and runs a 1kHz busy-spin PID loop — driving the ST3215 servo over half-duplex UART at 1 Mbps, firing a solenoid trigger via GPIO on target lock, and modulating TENS (EMS) intensity via two MCP4131 digital potentiometers over SPI.
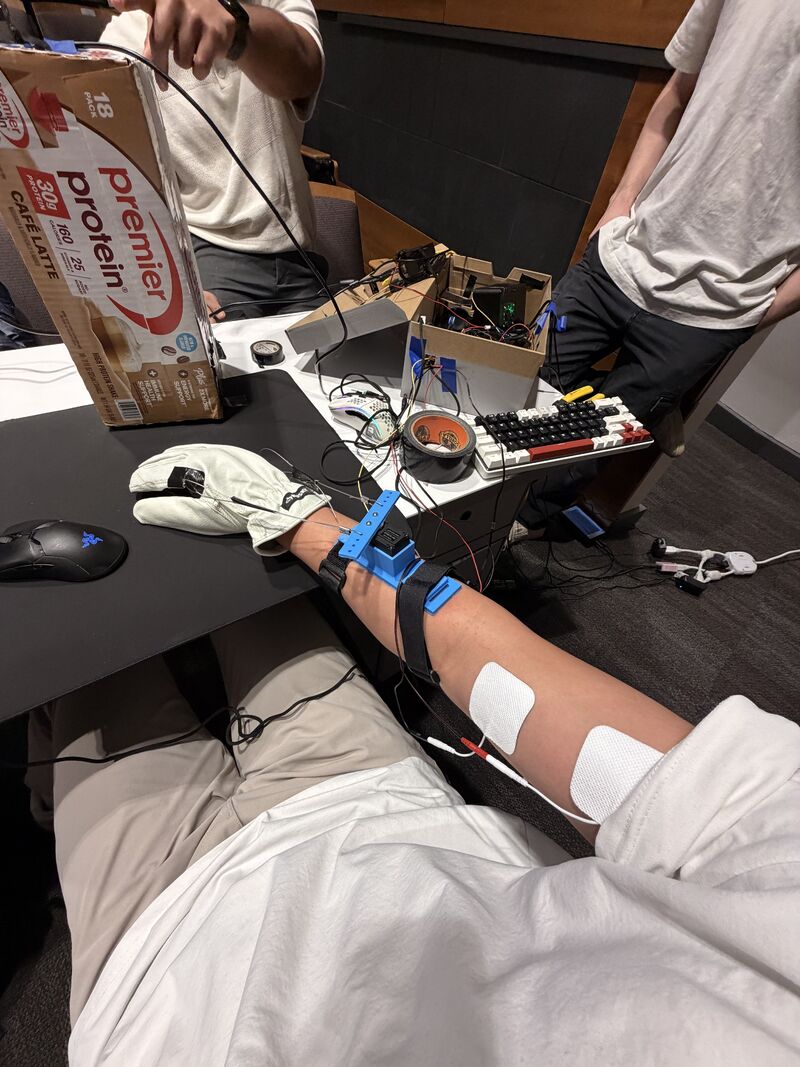
Demo Image
How It Works
Vision Pipeline
The Arducam OV9782 streams 1280×720 MJPEG at 100fps over USB 2.0 into a FrameGrabber thread with a shallow queue of depth 2. Pre-allocated numpy buffers eliminate per-frame heap allocation. Detection runs in two modes:
- HSV thresholding for Aimlabs cyan targets — ~2ms per frame
- YOLO11n for Valorant enemy detection, trained on A100 SXM and quantized for Jetson inference
Each detected frame produces a 20-byte big-endian UDP packet:
| Field | Type | Bytes | Description |
|---|---|---|---|
| timestamp | double | 8 | CLOCK_MONOTONIC capture time |
| tx | float | 4 | Target centroid X (pixels) |
| cx | float | 4 | Crosshair reference X (pixels) |
| blob_w | float | 4 | Target bounding-rect width (pixels) |
PID State Machine
The control node runs a 1kHz busy-spin loop (<5µs jitter) with a two-state machine:
| State | Condition | Controller | Purpose |
|---|---|---|---|
| FLICK | |error| > 30px | PD (Kp=3.0) | Fast ballistic move toward target |
| SETTLE | |error| < 30px | PID (Kp=3.0, Ki=0.15) | Precision lock with integral action |
| FIRE | |error| < 5px | Solenoid pulse | Target acquired — click |
Overshoot damping halves gains for 10 frames after error sign reversal. Backlash compensation ramps a dead-zone offset over 5 frames on direction change. Fire threshold, flick threshold, and settle gains all scale dynamically with apparent target size (blob_w) — tighter for distant small targets, more aggressive for close large ones.
TENS Integration
Two MCP4131 digital potentiometers over SPI (CE0 + CE1) modulate TENS electrode intensity as a function of pixel error. Large errors trigger stronger muscle stimulation, physically redirecting the arm before the servo completes its mechanical slew. This creates a two-channel correction: electrical (fast, ~1ms) and mechanical (slower, ~10ms).
Latency Budget
| Stage | Time | Notes |
|---|---|---|
| Camera capture | ~10ms | 100fps MJPEG, hardware-timed |
| HSV detection | ~2ms | Pre-allocated buffers, no malloc |
| UDP transit | <1ms | Direct Ethernet, no routing |
| PID compute | <1µs | All stack, no heap |
| Servo write | ~9µs | 9 bytes @ 1 Mbps |
| End-to-end | ~13ms | Pixel to servo movement |
Hardware
| Component | Role | Interface |
|---|---|---|
| NVIDIA Jetson Nano | Vision processing (HSV/YOLO) | USB (camera), Ethernet (UDP) |
| Arducam OV9782 | 100fps global shutter camera | USB 2.0 (MJPEG) |
| Raspberry Pi 4/5 | Real-time servo control | Ethernet (UDP), UART, GPIO, SPI |
| Feetech ST3215 | 12-bit digital servo (4096 steps/360°) | Half-duplex UART @ 1 Mbps |
| Solenoid | Mouse click actuator | GPIO via MOSFET driver |
| MCP4131 × 2 | Digital potentiometer (TENS intensity) | SPI (CE0 + CE1) |
| TENS unit | Transcutaneous electrical stimulation | Modulated by MCP4131 |
Challenges & Solutions
- 1kHz determinism on Linux: Achieving <5µs jitter on a non-RTOS required a busy-spin loop with CPU affinity pinning rather than timer-based sleep, trading a core for real-time guarantees.
- Half-duplex UART at 1 Mbps: The Feetech SCS/STS protocol uses a shared TX/RX line. Direction switching timing is critical — too slow and packets corrupt; too fast and the servo doesn't respond. First-order position smoothing absorbs the residual jitter.
- TENS safety: Intensity is hard-capped at MCP4131 wiper value 40 (out of 127). The TENS output is purely modulated through the potentiometer — the unit's own safety circuitry remains in the loop.
- Dynamic scaling with blob width: A naive fixed-threshold controller overshoots on close targets and undershoots on distant ones. Scaling all thresholds and gains proportionally to blob_w linearizes the response across ranges.
Achievement
AutoReflex placed 3rd at HackberryPi and demonstrates that hardware-level aim assist — operating entirely outside the game process — is feasible at latencies competitive with human reaction time. The same Jetson-to-Pi UDP architecture, PID state machine, and TENS integration pattern applies directly to any real-time physical control problem: robotic manipulation, prosthetics, or closed-loop rehabilitation devices.